时间:2023-11-08 10:00:00
如果您想了解我们的产品,可以随时拨打我公司的销售热线或点击下方按钮在线咨询价格!
立即拨打电话享更多优惠:15152149740(刘)
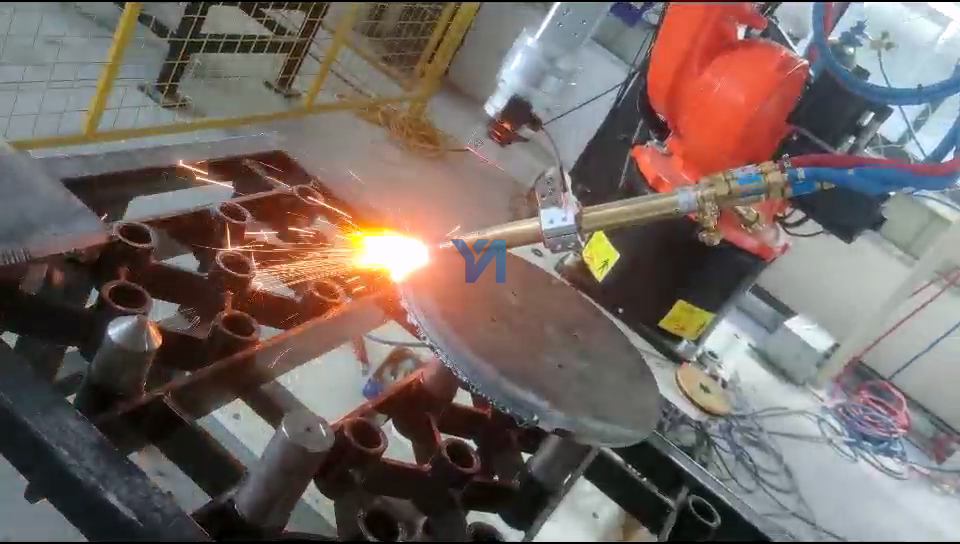
定位焊缝是在焊接开始前,先将被焊工件的焊缝和间隙固定下来,以防止在焊接过程中由于工件变形而导致焊接缺陷的技术。在焊接机器人中,定位焊技术通常由机器人携带的激光传感器或视觉传感器进行实现。

机器人通过传感器获取工件表面的信息,识别出焊缝的位置和形状,然后根据预设的焊接路径和焊接参数,将焊炬移动到正确的位置,并进行定位焊缝的焊接。
在定位焊缝的焊接过程中,机器人需要精确控制焊炬的角度、电流、电压等参数,以确保焊接质量和工件的稳定性。同时,机器人还需要具备高精度的轨迹规划和运动控制能力,以实现准确的定位和焊接。
焊接机器人焊接定位焊时需要掌握以下技巧:
1.定位焊必须认真仔细的按照焊接要求进行操作。在选用焊丝方面应与正式焊接时一样,同时还要考虑对整条焊缝的影响。听取焊接机器人厂家专业工程师的建议与意见,以免造成损失,耽误生产进度。
2.定位焊必须焊透,定位焊的焊点内不能出现未熔合、气孔、夹渣、裂纹等缺陷。确保定位焊焊透,从而不会影响整条焊缝质量。
3.定位焊的长度不宜过长,更不宜过高或过宽,低碳钢薄板焊件定位焊,焊缝长度一般为3-5mm,只是一个圆点。此外,定位焊焊点间隔20-50mm较厚的工件定位焊时,焊缝的长度为15-25mm,间隔100-250mm。开有坡口的焊件定位焊时,焊缝金属高度不超过焊件厚度的2/3为宜。
4.选择合理的焊接顺序,以减小焊接变形、焊枪行走路径长度来制定焊接顺序。
5.焊枪空间过渡要求移动轨迹较短、平滑、安全。
6.优化焊接参数,为了获得佳的焊接参数,制作工作试件进行焊接试验和工艺评定。
7.采用合理的变位机位置、焊枪姿态、焊枪相对接头的位置。工件在变位机上固定之后,若焊缝不是理想的位置与角度,就要求编程时不断调整变位机,使得焊接的焊缝按照焊接顺序逐次达到水平位置。同时,要不断调整机器人各轴位置,合理地确定焊枪相对接头的位置、角度与焊丝伸出长度。工件的位置确定之后,焊枪相对接头的位置必须通过编程者的双眼观察,难度较大。这就要求编程者善于总结积累经验。
8.及时插入清枪程序,编写一定长度的焊接程序后,应及时插入清枪程序,可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,保证焊枪的清洁,提高喷嘴的寿命,确保可靠引弧、减少焊接飞溅。
9.编制程序一般不能一步到位,要在机器人焊接过程中不断检验和修改程序,调整焊接参数及焊枪姿态等,才会形成一个好程序。
上一篇:人和机器人应该如何分工协作