时间:2024-01-10 09:30:00
如果您想了解我们的产品,可以随时拨打我公司的销售热线或点击下方按钮在线咨询价格!
立即拨打电话享更多优惠:15152149740(刘)
直角坐标机器人和关节机器人在结构和应用上有一些区别。
直角坐标机器人,也称为多轴模组滑台机械手,是基于空间XYZ角坐标系编程的自动化设备。它具有三轴及以上自由度,能够实现自动控制、可重复编程和反复使用,具有多功能、多自由度、多用途的特点。直角坐标机器人的工作行为主要是通过完成沿着X、Y、Z轴上的线性运动来实现的,结构相对简单,控制方便,占地面积大。其控制系统开放灵活,可以根据具体的应用需求进行定制和扩展。直角坐标机器人的重复定位精度高,可达到0.05mm,甚至更高,而且其承载能力可以根据需要进行定制,最大承载能力可达2400kg。
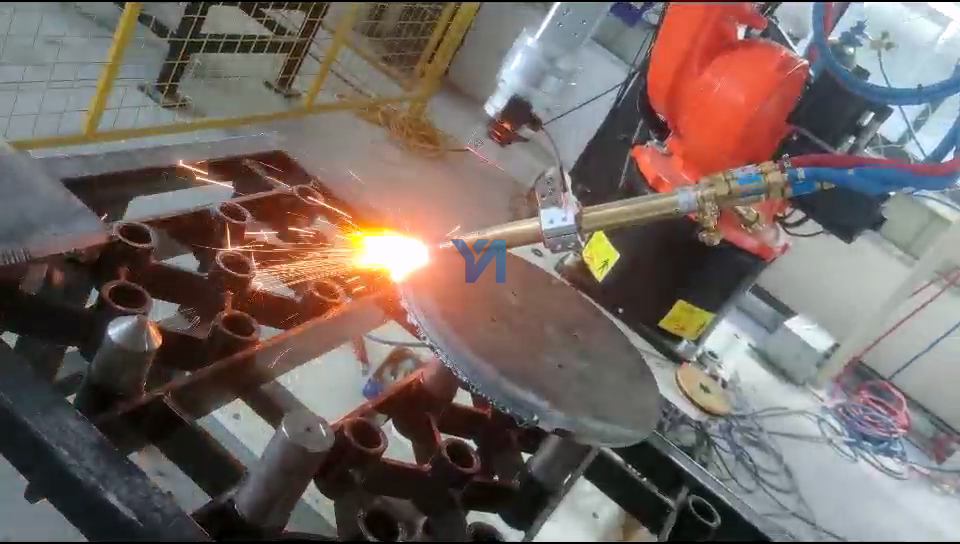
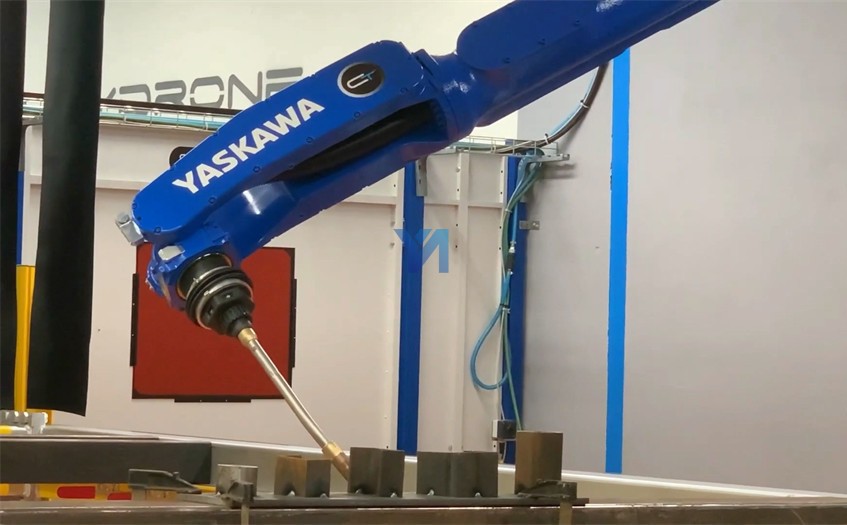
关节机器人也称为关节手臂机器人或关节机械手臂,是当今工业领域中常见的工业机器人形态之一。关节机器人通常具有五个或六个关节,通过关节的转动来实现机器人在空间的位置和姿态的改变。关节机器人的自由度较高,能够完成大部分轨迹或角度的工作,而且其工作空间相对较小,可以在有效半径内任意角度工作。关节机器人的控制系统集成化程度高,可以通过库函数直接调用,操作和维护成本相对较高。
总的来说,直角坐标机器人和关节机器人各有其特点和优势,选择哪种机器人取决于具体的应用需求和预算考虑。
上一篇:桁架机器人机械手组成分析构成分析
下一篇:工业机器人正在接管真正危险的工作